
中国の深圳を拠点とするロボットメーカーであるUBTECH(ユービーテック)は、2025年11月にヒューマノイドロボット「Walker S2」を数百台規模にクライアントに納入したことを発表しました。
UBTECHが開発するWalker(ウォーカー)シリーズは、「ロボットを家庭へ」という壮大なビジョンを実現するための中核をなす大型二足歩行ヒューマノイドロボットです。
単なる研究・展示用モデルの枠を超え、製造業やサービス業といった現実世界の産業現場で人間と協働し、労働力を代替することを明確に目指した設計思想に基づいています。
その特徴や今後の可能性などについて紹介していきます。
\フルリモートで働くならTopTier/
UBTECHの基本的な概要とコア技術
引用画像:https://ga-robotics.co.jp/products/walker-s1/
企業のビジョンと哲学
UBTECHは、「ロボットをあらゆる家庭へ」という壮大なビジョンを掲げ、創業以来ヒューマノイドロボットの研究開発に注力しています。
UBTECHの強みとしては、サーボモーターやAIアルゴリズム、オペレーティングシステムといったロボット開発のフルスタック技術を自社で保有している点にあります。
これらの技術をもとに、ロボットの高度な自律性と実用性を追求しています。
フィジカルAIとデータ優位性
UBTECHが特に重要視しているのが「フィジカルAI」(Physical AI)という概念です。
これは、AIが現実世界(フィジカルな環境)で物体を認識・操作し、自律的に行動するための知能のことを指します。
UBTECHでは長年にわたり教育現場や工場、物流、展示会などで数百万時間に及ぶ動作データや対話ログを蓄積しており、このリアルデータがAIモデルの学習と最適化において、他社の追随を許さない大きな優位性を生み出しています。
このように、ロボットが失敗する過程すらも学習素材にできる点もUBTECHが持つコア技術の根幹にあります。
UBTECH のWalkerシリーズの位置づけ

引用画像:https://prtimes.jp/main/html/rd/p/000000003.000160855.html
Walkerシリーズは、UBTECHの長年のヒューマノイド開発の歴史の中で、着実に進化を遂げてきました。
初期の開発と技術的課題の克服
初期のモデル(Walker 1.0など)は、主に二足歩行の安定化と全身協調制御といった基礎的な運動能力の確立に焦点が当てられていました。
これは、複雑な関節構造を持つヒューマノイドが、平坦でない地面や障害物に対してどのようにバランスを保ち、滑らかに動くかという、ロボティクスの根本的な課題をクリアするための段階でした。
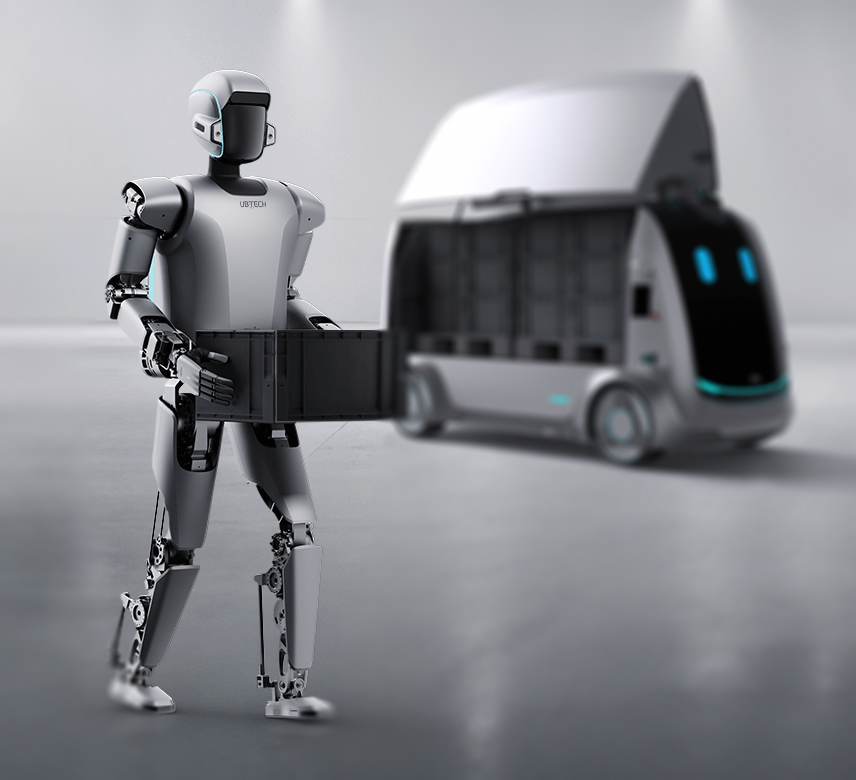
産業用モデルへの転換(Walker S2/X)
現在のWalker S2/Xの世代では、技術は「歩く・展示する」段階から「継続運用でき、現場投入が可能」な段階へと完全に移行しています。
このモデルは、身長約176cm、体重約70kg、全身の自由度(DOF)は50以上に達し、最大15kg程度の可搬荷重を持つなど、人間の作業者に近い物理的なスペックを実現しています。
Walker S2は、中国の自動車製造ラインや物流センターなど、高度な正確性と持続的な稼働が求められる環境への導入を前提として設計されています。
Walker シリーズの初期モデルと産業用モデルの比較
| 初期モデル (Walker / Walker X など) | 産業用モデル (Walker S1 / Walker S2 など) | |
| 主な用途 | 家庭・個人向けアシスタント、研究開発、デモンストレーション | 製造業・物流・点検などの現場での実作業、人協働 |
| 重視される性能 | 人間との相互作用、器用な操作、自律移動、家庭内の環境認識 | 実作業能力、高負荷耐久性、歩行安定性、知覚・判断能力 |
| 知能・制御 | 家庭内タスクの自律操作、家電操作、パーソナルアシスト | ROSA制御OS、Prov AIエージェントによるタスク計画・異常検知 |
| 手の機能 | 7自由度、力覚センサー搭載 (Walker X) | 第4世代Dexterous Hand (11自由度、6軸力覚センサー搭載) (Walker S2) |
| 耐久性・構造 | モジュール化設計(メンテナンス性向上) | 高剛性軽量ボディ、全天候型運用、軍用グレードの構造安定性 (Walker S1) |
| 代表的な作業 | 冷蔵庫やコーヒーメーカーの操作、掃除機操作、コミュニケーション | 無人物料搬送、自動車検査・塗装支援、設備点検、在庫・数量検査 |
コア技術:自社開発サーボと運動バランスの制御
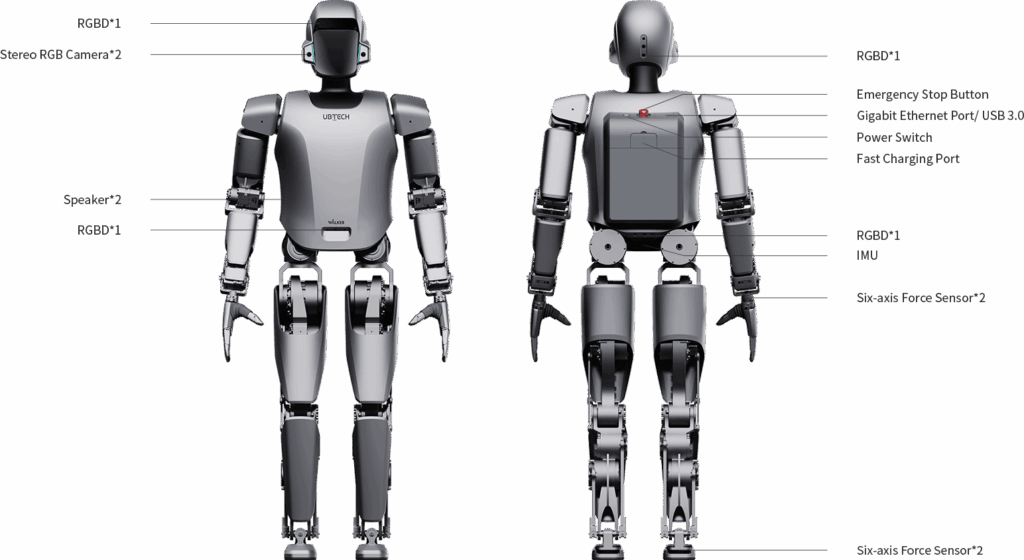
引用画像:https://ga-robotics.co.jp/products/walker-s1/
Walkerシリーズの実用性を支える基盤技術は、UBTECHが自社で開発・製造する高性能サーボモーターと、それを制御する全身協調制御アルゴリズムにあります。
高密度・高精度サーボ駆動システム
ヒューマノイドロボットにとって、関節を動かすサーボモーターは人間でいう「筋肉」に当たります。
Walker S2は、高性能な高トルク密度サーボを多数搭載しており、以下の特性を持っています。
- トルク密度と軽量化
駆動に必要なパワーを維持しつつ、モーター自体の小型化・軽量化を実現しています。
これにより、ロボット全体の慣性モーメントが低減され、より素早く、エネルギー効率の良い動作が可能になります。
- 高精度な位置・トルク制御
サーボ内部に組み込まれた高解像度エンコーダにより、関節の角度と出力をミリ秒単位で正確に制御します。
これは、繊細な部品の把持や、外部からの力に対する反発を正確に行うために不可欠な要素です。
卓越した二足歩行とバランス制御
二足歩行は、ロボティクスにおける最も難しい技術の一つです。
- ZMP (Zero Moment Point) 制御
ロボットが静止または歩行する際の安定性を保つための基本的な制御理論です。Walkerは、このZMPをリアルタイムで計算し、常に足の裏のどこに力を加えるべきかを判断します。
- 全身運動協調制御(Whole-Body Control)
安定した歩行だけでなく、物を持ち上げたり、手を伸ばしたりする際の全身の慣性力を打ち消すために、腕や胴体の動きも連動させます。
例えば、重い物体を持つ際に、上半身をわずかに傾けることでバランスを維持するといった、人間のような自然な動作を実現しています。
- 外乱対応能力
不整地や、他者から軽く押された場合などの外乱に対しても、関節のトルクセンサーと加速度センサーからの情報を瞬時に処理し、姿勢を修正する高いロバスト性(堅牢性)を備えています。
産業応用の中核:24時間稼働と産業界での実用性

Walker S2が産業界の期待を一身に集める理由は、実用性と継続的な稼働を可能にした設計にあります。
バッテリー自律交換システム(ホットスワップ)
これは、Walkerシリーズの最も画期的な特徴の一つです。
- 24時間無休の実現
Walker S2は、自ら充電ステーションに向かい、バッテリーを古いものから新しいものに交換する能力を持っています。
人間による充電やバッテリー交換の介入が不要になるため、ロボットは理論上24時間無休で作業を続けることが可能です。
- ROI(投資対効果)の向上
産業ロボットの価値は稼働時間に直結します。
この自律的なバッテリー交換機能は、ロボットの稼働率(アップタイム)を最大化し、導入企業にとっての投資対効果を大幅に向上させます。
EV工場での具体的な作業事例
Walkerシリーズは、特に高い精度と柔軟性が求められる電気自動車(EV)のスマート工場で実証実験が進んでいます。
| 作業カテゴリ | 具体的なタスク | 技術的な要件 |
| 品質検査 | ドアの開閉検査、部品の組み付け状態チェック、塗装面の視覚検査など | 高度な画像認識AIと正確な動作再現性 |
| 部品供給・搬送 | 特定の部品をピッキングし、指定された場所に運搬・配置 | 汎用把持能力と自律ナビゲーション |
| 作業補助 | 工具の受け渡し、治具(じぐ)の保持、簡単な組み立て作業 | 力覚(フォース・トルク)センサーを用いた繊細な操作 |
UBTECHは、中国の大手EVメーカーであるZeekr(ジーカー)社の工場などでWalkerのプロトタイプを稼働させ、これらの複雑なタスクを人間と協働してこなす動画を公開しています。
汎用的な器用さ(デクスタリティ)
人間の手の構造に近い多指ハンドと、それを制御する高度なAIにより、Walkerは汎用的な把持(グリッピング)能力を実現しています。
これは、従来の産業用ロボットが特定の形状の物体しか扱えなかったのに対し、形状や重さの異なる多様な部品を認識し、適切な力で掴み、操作できることを意味します。
AIの頭脳:フィジカルAIと量産化の意義

Walkerシリーズを単なる高性能な機械にとどめず、真の自律型ヒューマノイドたらしめているのが、その背後にあるAI技術です。
フィジカルAI(Physical AI)
UBTECHは、現実世界(フィジカル環境)で行動し、学習する能力をフィジカルAIと呼びます。
- データ駆動型学習
サービスロボットや教育ロボットを含むUBTECHの膨大なロボット群から収集される数百万時間の動作データ、失敗ログ、対話ログが、WalkerのAIモデルを学習させるための貴重な資源となっています。
このデータ優位性が、ロボットの未知の環境に対する適応能力を飛躍的に高めます。
- リアルタイム推論と行動計画
WalkerのAIは、環境認識(Lidar、カメラ)の結果に基づき、目標達成のための複雑な動作シーケンスをリアルタイムで推論・計画し、物理的な行動に変換します。
これが、工場内の障害物や変化に対応できる柔軟性を生み出します。
エンボディドAIとして世界初の「量産」ヒューマノイド
エンボディドAI(Embodied AI)とは、直訳すると「身体を持ったAI」のことで、物理的な身体(ハードウェア)に組み込まれ、現実世界の環境と相互作用しながら学習し、タスクを実行する人工知能システムのことを指します。
2025年、UBTECHはエンボディドAIとして「世界初となるヒューマノイドロボットの大量納入」という画期的なマイルストーンを達成したと発表しました。
- 数百台規模の納入
これは、Walker S2がプロトタイプ段階を終え、信頼性、再現性、コストパフォーマンスにおいて、産業界の要求水準に達したことを証明しています。
- 製造インフラの確立
ヒューマノイドは複雑な部品の集合体であり、その量産には高度な製造技術と品質管理が求められます。
UBTECHがこの量産体制を確立したことは、将来的にヒューマノイドロボットが家庭や職場に普及するためのコストダウンとスケールメリットの道筋をつけたことを意味します。
Walkerシリーズの今後の展望

UBTECHのWalkerシリーズの中でも特に産業用モデルであるWalker S2/Xは、ヒューマノイドロボット技術の現状を示すだけでなく、未来の労働環境を形作る鍵として注目されています。
ロボットと人間の協働(コボティクス)の進化
今後のWalkerシリーズの展開は、単なる作業の代替に留まらず、人間とロボットがシームレスに協働する環境(コボティクス)の構築に重点が置かれます。
- より安全な相互作用
力覚フィードバックとAIによる人間の意図予測技術が向上し、予期せぬ接触や動作を回避する能力がさらに洗練されます。
これにより、フェンスで隔てられた空間ではなく、人間と同じ作業スペースで安全に作業できるようになります。
- 汎用的な知能の統合
大規模言語モデル(LLM)やマルチモーダルAIがWalkerの頭脳と統合されることで、人間からの曖昧な指示(例:「あの箱を片付けて」)に対しても、環境を理解し、具体的な行動計画(どこに箱があり、どう把持し、どこへ運ぶか)を自律的に立てて実行できるようになります。
産業領域から生活領域への拡大
現在、Walkerは製造業での実証が進んでいますが、その汎用性が活かされることで、応用領域は急速に拡大することが予測されています。
- 物流・倉庫管理
複雑な形状の荷物の積み下ろし、棚入れ、ピッキング作業において、人型の柔軟性と俊敏性が活かされます。
- ヘルスケア・介護
病院や高齢者施設での物品搬送、簡単な介助、患者の見守りや移動補助など、人間への介入が求められる繊細な作業への進出が期待されます。
- 研究開発の加速
Walkerシリーズは、AIモデルが物理法則や環境の制約を学習するための「身体」として機能します。
これにより、AI開発者がシミュレーション環境だけでなく、現実世界でAIの知能とロバスト性をテストするフィジカルAIの研究プラットフォームとしても活用が進むでしょう。
量産効果によるコストダウンと普及
UBTECHが達成した数百台規模の量産体制は、ヒューマノイドの経済的な普及に向けた最大の布石です。
- ユニットコストの低減
量産化が進むにつれて、高性能サーボモーターやセンサー、制御コンピューティングユニットといった主要部品の製造コストが大幅に低下します。
- 投資のハードル低下
コストが下がることで、ヒューマノイドロボットの導入は、大企業だけでなく中小企業にも広がり、労働力不足の解決策として一層アクセスしやすくなります。
まとめ

UBTECHが発表したWalkerシリーズは、AI技術や高度なサーボ制御、そして実用性を最優先した設計により、ヒューマノイドロボットの産業応用という新しい時代を牽引していくことが期待されています。
特に、24時間自律稼働する能力と汎用的な作業実行能力は、労働力不足が深刻化する製造業や物流業界にとって、極めて大きな解決策となり得ます。
それゆえに、工場だけでなく高齢者介護や警備、そして最終的には家庭内での汎用的な労働力としても注目されています。
コメント